 平台热线
平台热线



一、Delta机器人特点
Delta机器人是典型的空间三自由度并联机构,整体结构精密、紧凑,驱动部分均布于固定平台,这些特点使它具有如下特性:
承载能力强、刚度大、自重负荷比小、动态性能好。
并行三自由度机械臂结构,重复定位精度高。
超高速拾取物品,一秒钟多个节拍。
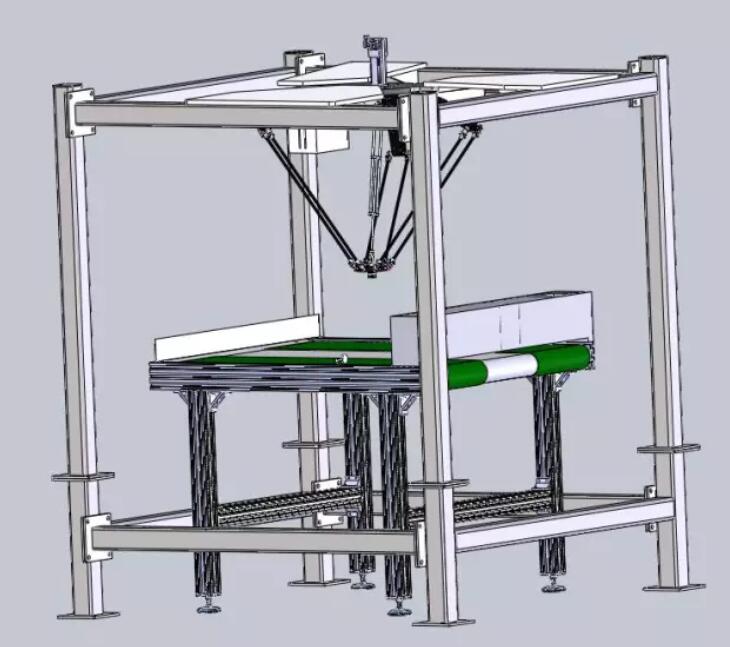
二、Delta机器人应用系统
Delta机器人应用系统主要由三个部分组成:机器人、输送线及机器人安装框架。其布局如下图。
1、机器人
机器人由基板、电机罩、旋转轴、主机械臂、副机械臂、抓具中心等组成,如下图所示。

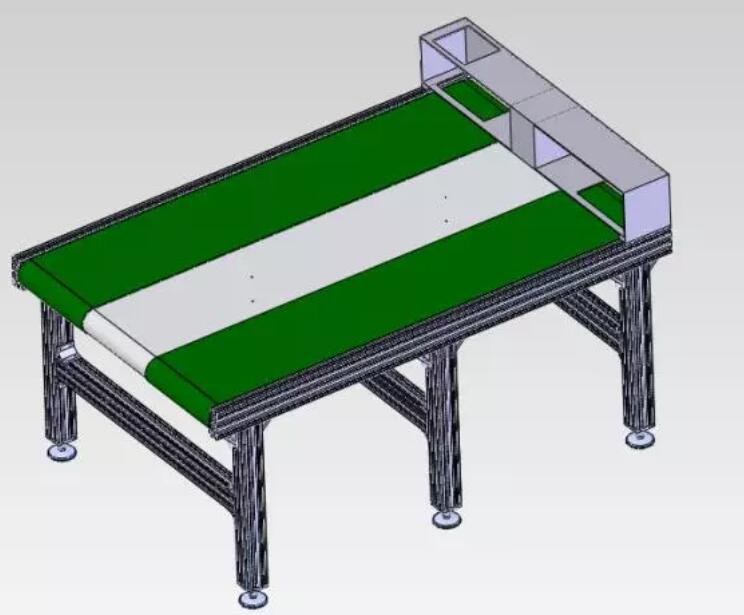
2、输送线
机器人配套输送线采用电机输送带方式,通过机器人视觉系统定位与输送线编码器反馈位置的方式,实现机器人对目标工件的位置、姿态识别和准确抓取。根据节拍与现场需要,可并行多条输送线同时操作。
3、机器人安装框架
机器人安装框架用来固定机器人机构,其结构及安装方式根据现场应用进行定制。
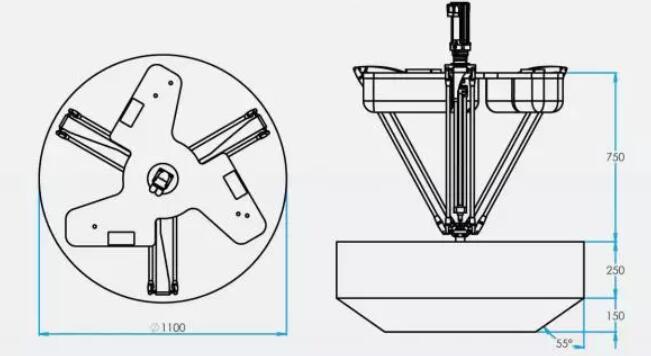
三、机器人工作空间
Delta机器人的工作空间由主机械臂及副机械臂的长度、动平台与静平台半径,以及主动臂活动角度范围这几个参数来确定。以负载为一公斤的delta机器人工作空间为例,如下图所示。
四、机器人运动轨迹
Delta机器人基本的运动轨迹如下图,由S1、S2、S3构成门字形的三部分轨迹组成,分别为拾取、平移、放置三个阶段。
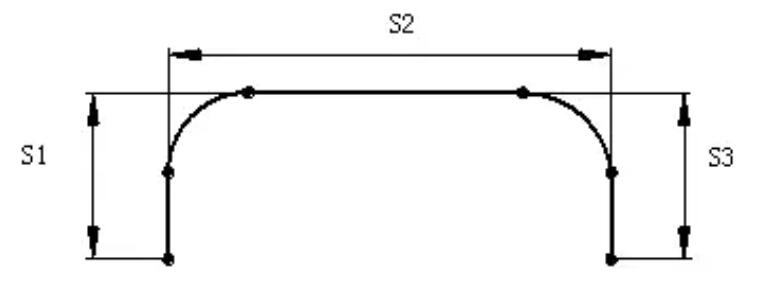
Delta机器人进行抓取目标工件时主要以走门字形运动轨迹,也可根据不同的应用要求,规划不同的运动轨迹。
五、产品用途
各类食品包装生产线
药品分拣、收集
电子行业:电路板焊接
轻质产品的包装及加工装配
更多欧姆龙机器人请点击咨询:欧姆龙机器人
